2018 年在 iPhoneX 初次亮相的 Face ID,除了讓智慧型手機的安全及便利性更上了一層樓,也正式引爆了 3D 感測(3D Sensing)在消費市場端的需求。今天這系列的文章將會帶各位讀者了解 3D 感測的原理、概況、未來前景及相關供應鏈。看完這篇文章,你將會了解以下幾件事:
- 什麼是 3D 感測?未來市場有多大?
- 3D 感測原理:立體視覺 vs 結構光 vs ToF 飛時測距
- 支撐 3D 感測的重要雷射技術,VCSEL 是什麼?
- VCSEL 未來展望及台廠供應鏈誰受惠?
什麼是 3D 感測?未來市場有多大?
在 2D 的世界中,我們只有 x 軸和 y 軸的資訊,所以得到的影像資料也都是平面的,比如說我們在拍照時只會知道這個人的身高體型,卻無從得知他鼻子突出來多少、眼眶凹下去多少。
而 3D 的世界則加入了 z 軸,也就是深度的資訊,這麼一來,我們得到的影像就會是立體的。而所謂的 3D 感測,顧名思義就是在感應偵測 3D 的立體影像,我們其實可以把它想成是人類的眼球運作。
一但能感測出立體的資訊,整個應用的場景就可以大幅增加,小到智慧型手機上的人臉解鎖、3D 相機、智能音箱、自駕車的偵測系統、人臉鑰匙、手勢感應,大到 AI 機器人的感測、工廠控制、醫療、AR/VR 等應用,3D 感測的普及將大幅顛覆我們對世界的想像。

Xbox Kinect 就已經亮相,但當時受限於體積及價格,技術也不夠成熟,因此一直未能普及。
隨這幾年晶片運算能力越來越強,以及 AI 運算的普及, 3D 感測再次成為市場的焦點,而 Apple 在 2018 年 iPhoneX 首次亮相的 Face ID,則正式引爆了 3D 感測在消費品端的需求。
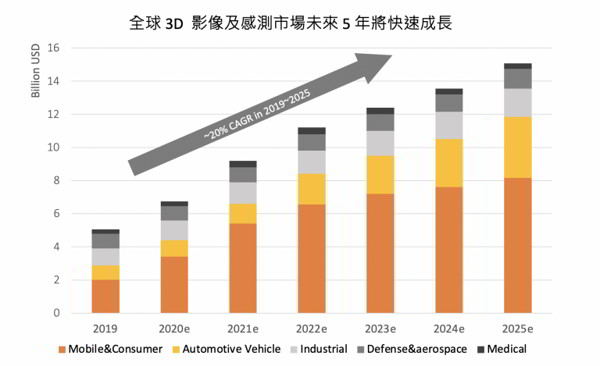
根據研調機構 Yole Développement 研究指出,全球 3D 影像及感測市場將由 2019 年的 50 億美元成長到 2025 年的 150 億美元,CAGR 超過 20%,其中又以智慧型手機及車用為主要應用,在 2025 年市場規模分別可達到 81 億美元及 37 億美元,兩者合計份額達 80%, CAGR 分別達 26% 及 28%。除了表示 3D 感測未來的成長潛力,也顯示消費端的需求增加是帶動這波趨勢成長的關鍵。
3D 感測 原理:立體視覺 vs ToF 飛時測距 vs 結構光
知道了 3D 感測的前景後,讓我們簡單看看他的原理吧!
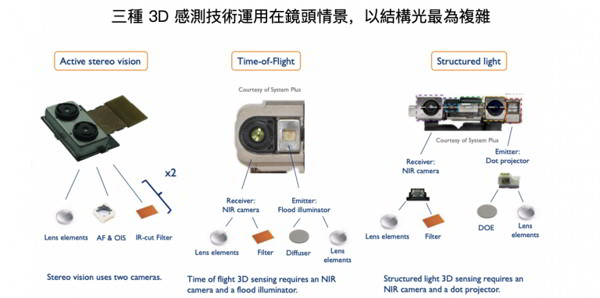
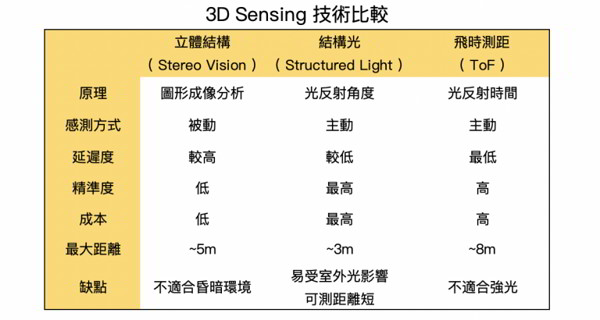
目前 3D 感測的技術主要有三種,依成熟度高低分別是立體視覺(Stereo Vision)、結構光(Structured Light)、及飛時測距(Time of Flight,俗稱 ToF),以下簡單介紹他們的原理及優劣。
立體視覺(Stereo Vision):
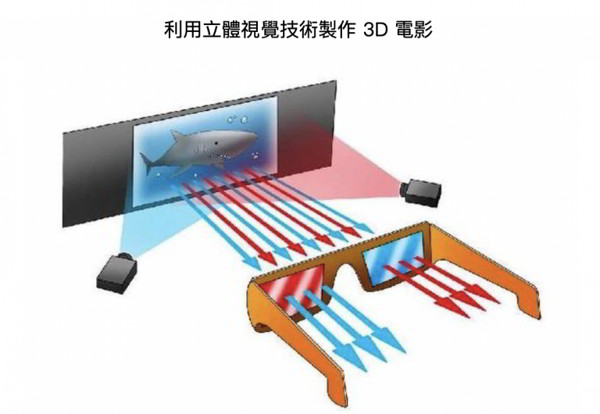
我們人類看東西之所以會有立體感,是由左右兩眼的視差所造成的。而立體視覺主要就是在模仿人的雙眼,利用兩個投影點成像之間距離的落差算出立體的資訊(也就是 Duo Camera)。
其中最具代表性的應用就是 3D 電影了,想必大家都有看過 3D 電影或玩過 3D 電玩,每次都要帶上一個眼鏡,否則畫面就會很模糊。其實這種電影就是利用左右兩台投影機分別將影像投在同一個螢幕上,再利用 3D 眼鏡進行濾波,使觀看者左眼只會收到左投影機投射的影像、右眼只會收到右投影機的,因此我們看起來就會是立體的畫面。
立體視覺由於技術成熟、成本又低,是目前應用最廣的技術,舉凡 3D 電影、深度相機、AR/VR 眼鏡、機器人、工控、導航等都能看到他的蹤跡。但致命缺點就是他是被動式測距(完全是靠拍攝的兩張影像來計算深度,並不會主動投出光源感測),所以延遲比較高、精確度也低。此外,也無法在昏暗的環境使用。因此就較難單獨應用在像智慧型手機、自駕車這種要求低延遲、又要能全場景使用的場景上。
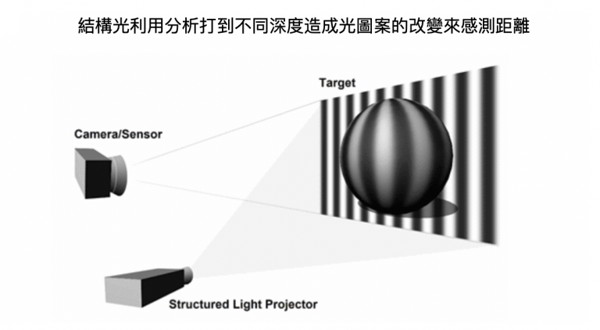
結構光(Structured Light)
結構光則是一種主動式的感測技術,原理就是透過打出特定圖案的光(通常為紅外光)到目標物體上,這個光的圖案可以是條紋、光點,也可是其他形狀,而每個圖案都有特定的編碼(Light Coding),由於不同深度的物體會導致光的扭曲變形,因此接收端就可藉由比較傳回來的影像編碼差異,來算出不同的深度距離。
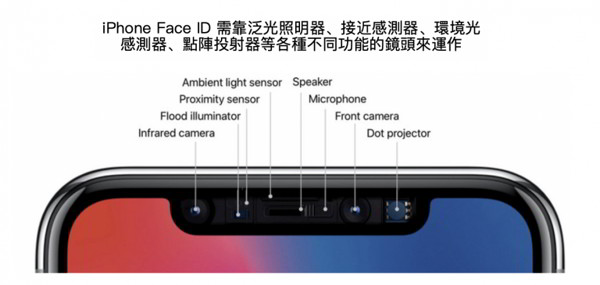
結構光的準確度高、延遲也低,目前相關技術專利主要掌控在 Apple 手中,也已被廣泛用在 iPhone 的 Face ID 上。但缺點就是技術複雜,下圖可看到光是 Face ID 就需要好幾個不同功能的鏡頭、感測器和接收器才能運作,這也是為何 iPhone 這幾年一直拿不掉瀏海的原因。(但我們推估 Apple 也在往沒有瀏海的方向發展)
此外,結構光能感測的距離也短(最遠大約 3 公尺),又因容易被自然光影響,較難以在戶外大範圍使用。因此我們認為結構光因成本高、距離短等限制,應用場景有限。
飛時測距(俗稱 ToF,Time of Flight)
而最後一種技術, ToF ,和結構光一樣也是主動感測,打紅外光到物體上,由感測器接收折回來的反射光,不過 ToF 是利用光打出去到回來的時差算出目標的距離深度。由於光速(v)和時間(t)都是已知的,因此就可以簡單算出距離。相比結構光的運算簡單不少。
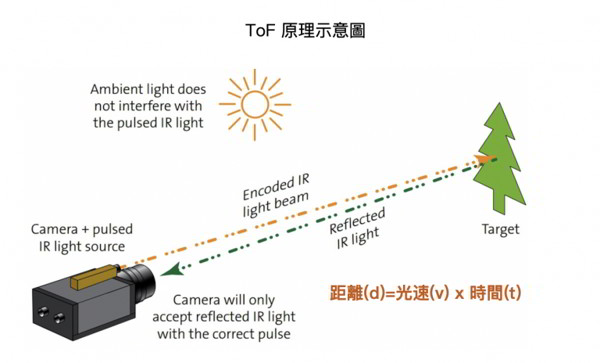
雖然 ToF 辨識的精準度沒結構光好,但他能感測的距離遠,且複雜度、成本也相對低、對光干擾的抵抗性也很好。
因此隨著 ToF 技術逐漸成熟,我們認為 ToF 將會是未來 3D 感測的主流技術,而智慧型手機後鏡頭、車用將可能是最大的應用場景(像 Apple 在 2020 年發布的 iPad Pro 採用的 ToF LiDAR 光達鏡頭,其 AR 的應用非常廣,例如下圖,可以在家模擬新傢俱擺放位置等等。)